CW(Continuous Wave) Radar
레이더 시스템이 전송할 수 있는 가장 기본적인 파형은 연속파 (CW)로, 이는 순수한 사인파 신호로 정의된다. 수신된 신호는 유사한 형태를 가지게 되고 송신 신호의 식은 다음과 같다.

A(t)는 진폭, f는 주파수, 위상은 θ이다.
레이더 수신기는 수신된 신호의 정확한 위상이 무엇인지 알아야 하는데 사인 함수에 대한 정보로 특정 각도를 파악하기는 어렵다. 그래서 수신된 신호에 송신 신호의 주파수의 사인, 코사인을 Mix함으로써 고유한 위상을 찾을수 있도록 만들수 있다.

LPF를 통과시킨 후 각각은 위상의 코사인, 사인 항을 생성하고, 두 항에 의해 위상을 명확하게 알 수 있다. 이 때 cos항은실수부분으로 I채널, sin항은 90도 위상이동 되어 허수 부분으로 Q채널로 지정된다. I채널과 Q채널로 레이더 수신기로 획득된 데이터 Asin(2πft + θ) 는 단일 복소 신호로 표현될 수 있다.


수신된 신호의 진폭 A(t)는 Radar Range Equation에 따라 모델링된 수신 전력 Pr에 관련되어 있다. A(t)는 거리에 따라 달라지지만 진폭 측정을 통해 정확한 거리 추정은 어렵다. 일반적으로 거리 측정은 왕복 타임 딜레이 td를 측정하여 R=c*td/2로 계산하지만 CW 레이더의 경우 신호를 지속적으로 발사하므로 펄스 레이더처럼 신호의 왕복시간을 측정할수 없어 거리 측정이 불가하다.
대신에 표적의 Radia Velocity를 측정할수 있는데 이는 관측자 쪽으로 일직선 방향으로 다가오거나 멀어지는 속도이다. 표적이 움직이고 있다면 수신된 신호의 주파수 fr은 도플러 효과에 의해 약간 이동하게 된다.

v는 다가오는 표적의 radial velocity, c는 빛의 속도, ft는 전송된 신호의 주파수이다. 표적의 속도가 빛의 속도보다 매우 작다고 가정했을 때 테일러 급수에 따라서 다음과 같이 쓸수 있다.

fd는 도플러 시프트 또는 도플러 주파수로, 송신된 파형과 수신된 파형의 주파수 간의 차이로 정의할수 있고 이를 이용하여 표적의 radial velocity를 측정할 수 있다.
Pulsed CW radar
펄스 CW 파형을 전송함으로써 거리와 속도 둘다 측정할 수 있게 된다. 다음 그림으로부터 설명하겠다.

펄스 폭은 CW 신호가 송신되는 시간, PRI는 펄스 사이 시간 간격이다. 일반적으로 모노스태틱 송수신기는 신호를 송신하는 동안 근거리 백스케터링이 수신될수 없다. 그래서 인지 가능한 최소 거리는 다음과 같다.

펄스폭에 해당하는 τ 시간 이후부터 신호 수신이 가능한데 τ시간이 거리에 대한 왕복 시간에 해당하므로 c*τ/2가 된다.
일반적으로 표적까지의 거리는 각 PRI의 시작으로 부터 계산이 되므로, R0의 거리에 위치한 표적의 경우 수신된 신호의 왕복 시간을 찾을수 있다.

하지만 거리가 PRI보다긴 시간에 해당하면 레이다 시스템은 표적까지의 거리를 Rtrue - (c / 2)(m x PRI)로 잘못 인식하게 된다. 여기서 m은 신호를 수신하기 전에 전송된 펄스의 수이다. 여튼 이런 식으로 이전 펄스의 신호를 수신하지 못하고 다음 펄스가 발생되어 거리를 잘못 측정한 것을 range alasing이라 하고 이에 따라 maximum unambiguous range 가 계산된다. 이 거리 내의 표적에 대해서만 정확한 거리 측정이 가능하다.

펄스 레이더 시스템에서는 보통 수신 신호에 매치드 필터를 적용함으로써 왕복 시간 t0를 쉽게 찾을 수 있다. 매치드 필터는 출력 SNR을 최대화하는 성질을 가진 필터이다. 일반적으로 송신 신호 x(t)의 매치드 필터는 다음과 같다.

α는 상수 스케일링 상수이다. 필터 자체는 입력 신호의 시간을 역전시킨 켤레이다. 펄스 CW 파형에 대한 매치드 필터 출력은 표적 거리에 해당하는 시간 지점에 피크를 가지고 있다. 따라서 피크의 시간을 구함으로써, 표적까지의 거리를 확인할 수 있다.
Range and Doppler Resolution
레이더 시스템 설계에서 중요한 요소는 해상도이다.(거리나 속도-도플러 에서 두 표적을 구별하는 능력) 신호 분석에 유용한 도구로 신호를 주파수 도메인에서 해석할 수 있게 하는 푸리에 변환이 있다.

예를 들어, 매치드 필터 출력의 푸리에 변환을 고려하면, 그림에는 시간 도메인에서 분리되어 있는 두 CW 펄스가 있다. 두 펄스를 구별하기 위해서는 한 응답의 피크가 다른 응답의 널(null)과 정렬되어야 한다(이상적인 상황). 푸리에 응답의 피크에서 널까지의 대역폭이 1/τ (Hz)이므로, 이는 시간의 차이 τ에 해당하므로 시간 도메인으로 전환 했을 때 두 펄스의 시간 차이가 τ 가 되도록 해야한다는 것을 뜻한다. - [펄스 폭 τ와 주파수 도메인의 대역폭(피크에서 널까지) 사이의 관계는 푸리에 변환의 특성 때문이다. 푸리에 변환은 시간 도메인에서 주파수 도메인으로 신호를 변환하는 도구로, 시간과 주파수 사이에는 반비례 관계가 있다. 즉, 펄스의 폭이 τ일 때, 해당 펄스의 주파수 도메인에서의 대역폭은 1/τ Hz가 된다.]
즉 거리로 전환해서 펄스 CW 파형의 거리 해상도는 다음과 같다.

레이다 시스템에서 물체의 속도 측정 시 인식할수 있는 최소한의 속도차이를 의미하는 도플러 해상도 역시 N개의 CW 펄스의 전송에 대한 푸리에 분석을 통해 찾을 수 있다. 이 경우, 푸리에 변환의 피크에서 널까지의 대역폭이 도플러 해상도를 결정하며, 이는 전체 관찰 기간의 역수로 찾을 수 있다.
피크에서 널까지 대역폭이 좁을수록 주파수 변화를 정밀하게 측정할 수 있다.
-> 대역폭이 좁다란 건 각 주파수 성분이 차지하는 주파수 범위가 작다는것으로 더 많은 수의 주파수 성분을 더 촘촘히 측정할수 있다는 것이다. 또한 대역폭과 전체 관찰 시간은 역수 관계인 것은 다음과 같이 설명이 가능하다.
--> 전체 관찰 시간과 대역폭은 역수 관계인데 이 이유는 다음과 같다. 긴 시간 동안 신호를 측정하면, 더 낮은 주파수의 성분까지 측정할 수 있게 된다. 낮은 주파수의 성분은 더 긴 주기를 가진다. 예를 들어, 1Hz의 주파수는 1초의 주기를 가지고, 0.5Hz의 주파수는 2초의 주기를 가진다.
따라서, 전체 관찰 시간이 길어질수록 더 긴 주기를 가진 주파수 성분을 측정할 수 있게 되고, 이는 신호를 더 세밀하게 분석할 수 있게 한다. 이 세밀한 분석은 대역폭이 좁아지는 결과를 만든다.

속도 해상도는 다음의 도플러 시프트 관계식을 사용해 구할수 있다. 위의 *도플러 주파수 식으로 부터

펄스 CW 파형은 거리와 속도를 둘다 측정할수 있다. 하지만 평균 신호 전력과 해상도 사이에 trade-off가 있는데 펄스폭이 감소하면 거리 해상도가 향상 되지만 송신 전력도 감소해 타겟 감지 확률이 줄어든다는 것이다. 이것에 대한 해결책으로 LFM 신호를 송신하는 것이 있다.
Pulsed-Dopppler Radar
LFM 또는 chirp 신호는 주파수가 선형적으로 증가하는 사인파 형태로 정의된다.

f0는 레이다 시스템의 중심주파수, K는 chirp rate로 β / τ이다. 그래서 LFM 신호의 순시 주파수는 위상의 도함수/2pi 이므로 f0+ β * t / τ이다.
chirp 파형의 경우 매치드 필터의 출력은 시간 도메인에서 sinc함수이다. 따라서 인식 가능한 두 표적 사이 최소 거리는 한 표적의 피크가 다른 표적의 null과 정렬되는 상황에 해당한다. 시간 도메인에서 피크-null 간격이 1/ β이기 때문에 1/ β * c를 해서 거리를 구한후 왕복거리이기 때문에 /2를 해서 거리 해상도는 다음과 같다.

이렇게 거리 해상도가 펄스 폭과 분리되었다. 이로 인해 신호 전력과 해상도를 독립적으로 설계할수 있다.

Frequency-Modulated Continuous Wave(FMCW) Radar
펄스 도플러 레이다는 장거리에 주로 사용되면서 위의 펄스 CW레이다에서 얘기했던 최소 탐지거리는 문제가 되지 않는다. 단거리에는 FMCW를 사용하고 최소 탐지거리 제한이 없다. - 일반적으로 송수신을 위해 별도의 안테나를 가 최소 탐지 거리가 없다.
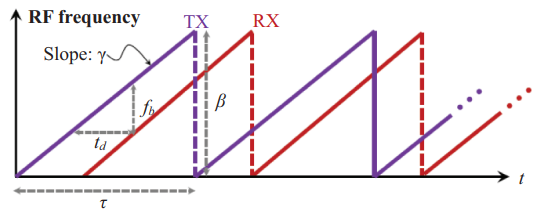
FMCW 레이다는 일반적으로 넓은 대역폭을 가지도록 설계되어 향상된 거리 해상도를 제공할 수 있다. - FMCW 파형의 주파수는 시간에 따라 일정하게 변화하는데 여기서 발생하는 주파수 변화 범위가 대역폭이다. 대역폭이 높을수록 이 주파수 차를 세밀하게 측정할 수 있고 거리 해상도가 향상된다.
FMCW 레이다의 최대 대역폭은 펄스폭 τ 와 chirp rate K에 의해 제한된다.( B=K * τ ) 최대 거리 범위는 PRI에 의해 제한되고 이 경우에 펄스지속 시간 τ 와 같다. 왕복 비행시간 td와 거는 송신 신호와 표적으로부터 반환된 신호 간의 주파수 차이 fb를 구한다면 결정할 수 있다. 이 식은 FMCW 레이다의 주파수 변화가 선형적이라는 가정에 기반한 것으로 다음과 같이 거리 R을 구할수 있다.
Ambiguity functions and range-Doppler coupling
수신된 신호의 amplitude와 위상이 매치드 필터와 일치하면 매치드 필터는 최대 출력의 SNR을 생성한다. 만약 표적의 속도를 사전에 알고있다면 최대 출력의 SNR을 얻을 수 있을 것이다. 하지만 사전 정보가 없다면 속도, 즉 표적의 도플러 시프트 결과는 일치하지 않을 것이다. Ambiguity function 모호성 함수는 매치드 필터 출력에서 표적의 도플러 시프트 효과를 특성짓는 방법이다. 모호성 함수는 다음과 같이 정의 된다.

x(α) exp (j2πfdα)는 도플러 시프트된 수신 신호이고 α는 적분 변수이다. 이상적인 모호성 함수는 다음 그림과 같이 압정 처럼 생겼다 : 매치드 필터 출력은 표적의 거리와 도플러에서 최댓값이고, 다른 모든 곳에서 0이므로 레이더 측정에서 불확실성이 없다. 반면에 FMCW 파형의 모호성 함수는 비스듬한 능선 형태라서 표적과 매치드 필터의 도플러 불일치가 거리 측정에서의 Shift를 만든다. - 표적의 실제 속도(도플러 시프트)와 레이더가 측정한 속도(매치드 필터의 도플러) 사이에 불일치가 있을 경우, 이 불일치가 거리 측정에 영향을 미친다는 것을 의미한다. 즉, 도플러 시프트의 오차가 거리 측정의 오차로 변환되는 현상을 말한다.

이것을 Range-Doppler 커플링 이라고하고 거리 측정이 FMCW 레이더에서 수신 주파수의 차이 측정을 통해 이루어지는 결과다. Range-Doppler 커플링 때문에, 정지 표적에 대한 거리 측정은 레이더로부터 같은 거리에 위치한 이동 표적에 대한 범위 측정과 다르다.
'레이다 > 레이다' 카테고리의 다른 글
| 레이다(RADAR) 신호 전파 및 특성 (2) | 2024.01.13 |
|---|---|
| 레이다(RADAR)란 무엇일까? (0) | 2024.01.11 |

